
This Task does a shape based sweep on the collision world. The task uses the location of the shape at the start, and then at the end of the task for the sweep parameters.

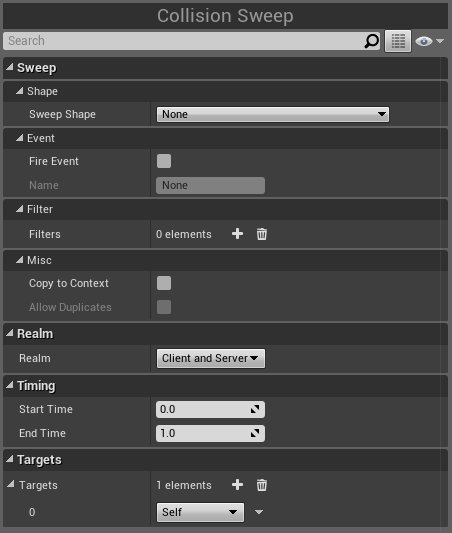
Sweep
- Sweep Shape
- The shape to use in the query. Supports Box, Cone, Sphere, and Capsule shapes. See Targeting for an overview of each shape and the various properties for each.
- Fire Event
- If true, after the collision sweep is done the Task will call the OnCollisionEvent method on the Ability.
- Name
- This name will be passed along with the sweep results in the OnCollisionEvent method on the Ability.
- Filters
- See Filters.
- Copy to Context
- If true, the results will be copied into the Ability Context's Target Actors array. See Ability Context for more details.
- Allow Duplicates
- If using the Copy to Context option, this option determines whether or not to allow duplicate Actors within the Target Actors array.
Realm
- Realm
- Which Realm (Client/Server) to run this Task on. Note: Server Realm still executes on the Local Player Controlled Client for simulation purposes. Ignored if non-networked game.
Timing
- Start Time
- When to begin this Task.
- End Time
- At the End Time this task won't actually be complete, but will instead actually perform the sweep at this point and be done in a frame or two depending on if the shape uses an Async query or not.
Targets
- Targets
- The Context Target Types to execute this Task logic on.
Release Notes / Revision History
- 1.0